

Meningkatkan Akurasi Diferensial GPS
Akurasi lokasi dapat di tingkatkan dengan menggunakan teknik yang di sebut Di ferensial GPS atau DGPS. Teknik DGPS di dasarkan dengan menggunakan setidaknya dua receiver GPS. Salah satu receiver terletak di posisi tetap yang telah secara akurat di ukur dengan teknik survey yang konvensional. Receiver ini di kenal sebagai base station,dan juga berisi komputer.
Receiver yang kedua keliling yang di sebut dengan rover, dan di gunakan dengan survei dalam kegiatan navigasi. Base station mengambil bacaan GPS terus menerus dan menghitung “posisi” nya berdasarkan data GPS. Komputer kemudian membandingkan posisi receiver berdasarkan pada data GPS ke lokasi receiver yang sebenarnya yang di dasarkan pada survei konvensional yang akurat. Perbedaan antara GPS di hitung sebagai “posisi” dan posisi nyata dari receiver adalah kesalahan dalam GPS untuk bacaan tertentu.
Setiap membaca juga waktu di cap, jadi kita tahu kapan waktu kesalahan yang valid dalam hari. Sistem Low-end diferensial mampu dalam akurasi sub meter, terutama jika base station dalam beberapa mil hingga puluhan mil dari receiver yang keliling (kedua) dan baik receiver base station dan receiver melihat set satelit GPS yang sama.
Peralatan Highend DGPS mampu akurasi dalam subsentimeter. Dua jenis sistem differensial GPS yang ada: DGPS dan Real-time DGPS. Dalam Post Processing DGPS, base station mencatat waktu setiap pembacaan dan faktor koreksi terkait. Pada akhir hari, data positional dari receiver GPS keliling di download ke komputer dan setiap pembacaan di koreksi (berdasarkan waktu bacaan tersebut di ambil).
Pendekatan ini cukup baik untuk survei atau kegiatan lain di mana posisi yang tepat dari receiver keliling tidak penting pada saat pembacaan. Namun, pendekatan post-processing adalah penggunaan untuk navigasi atau real-time tugas posisi, seperti membimbing pesawat untuk landasan pacu.
Real-time DGPS termasuk pemancar radio pada base station. Setelah setiap pembacaan GPS, base station cepat menghitung kesalahan dan mengirimkan melalui sinyal radio ke rover. Rover perlu di lengkapi dengan receiver radio yang sesuai dan kemampuan komputasi untuk menambahkan faktor koreksi dalam pembacaan mereka sendiri secara waktu real.
Lokasi di tampilkan pada receiver GPS dengan faktor kesalahan yang di miliki. Gambar berikut mengilustrasikan konfigurasi DGPS Real time.
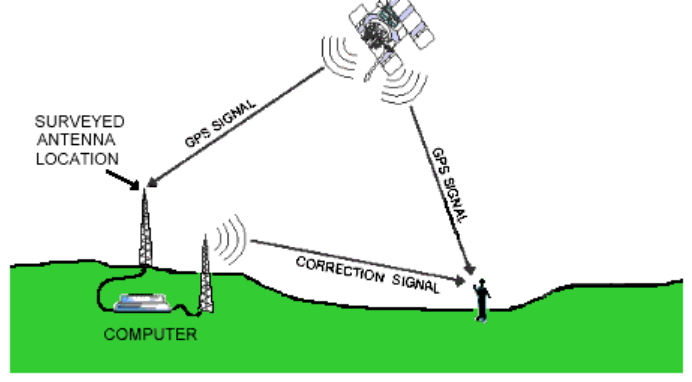
Receiver Keliling memperoleh data posisi yang di koreksi dari satelit GPS dan faktor koreksi dari base station. Dengan cara ini,akurasi meningkat secara signifikan. Dalam prakteknya, post-processing masih di gunakan untuk kegiatan survey. Proses pengolahan semua data di akhir kegiatan memungkinkan untuk analisis statistik canggih dalam meningkatkan akurasi.
Perhatikan bahwa hanya satu satelit akan muncul. Pada kenyataannya, base station harus menerima sinyal dari semua satelit yang terlihat ke receiver keliling atau rover. Untuk akurasi tertinggi di daerah setempat, mendirikan base station dan menggunakan DGPS adalah pendekatan yang terbaik.




